Objetivo:
Gerar um sinal PWM com 1Khz +/-12V proveniente de um microcontrolador (ESP32 ou Arduino) e um leitor de CP através dos CAD (Conversores Analógicos digitais) dos microcontroladores. Considere que usaremos o Arduino UNO. O LM358 será alimentado com fonte simétrica de +12V no pino 8 e -12V no pino 4.
🧠 ⚡ Introdução
O sinal Control Pilot (CP) é o principal canal de comunicação entre o carregador (EVSE) e o veículo elétrico, definido pelas normas:
- IEC 61851
- SAE J1772
Ele permite:
✔ detectar presença do veículo
✔ indicar estado de conexão
✔ informar corrente máxima de carga
✔ garantir segurança do sistema
⚡ 🔌 Características do sinal CP
O EVSE gera:
👉 Esse sinal é aplicado entre:
📌 Segundo a norma:
- Frequência: 1 kHz
- Amplitude: +12V a -12V
- PWM define corrente máxima
📊 ⚡ Estados do CP (fundamental)
| Estado | Tensão CP | Significado |
|---|---|---|
| A | +12V | veículo não conectado |
| B | +9V | conectado |
| C | +6V | pronto para carregar |
| D | +3V | ventilação requerida |
| E | 0V | erro |
| F | -12V | falha |
👉 Esses níveis são definidos pela carga resistiva do veículo
🧠 ⚡ PWM e corrente de carga
O duty cycle define a corrente:
Exemplo:
| Duty | Corrente |
|---|---|
| 10% | 6A |
| 50% | 30A |
| 80% | 48A |
🔧 ⚡ Gerador de CP (implementação prática)
🔹 Etapas
↓
Conversor de nível
↓
Driver push-pull
↓
Saída ±12V
🔹 Desafio principal
Converter:
🧠 ⚡ Como o LM358 está sendo usado
👉 No caso, o LM358 não está sendo usado como amplificador linear comum, mas como:
⚡ 🔧 1) Ideia do circuito do seu artigo
🔹 Entrada
- PWM do ESP32:
🔹 Alimentação do LM358
V- = -12V
👉 Isso é o ponto chave 👇
🔥 ⚡ 2) O que isso permite
Com alimentação simétrica:
👉 o LM358 consegue gerar:
(na prática um pouco menos, tipo ±10~11V)
🧠 ⚡ 3) Funcionamento do circuito
🔹 Comparação
O LM358 compara:
🔹 Resultado
| PWM | Saída LM358 |
|---|---|
| > 2,5V | +12V |
| <2,5V | -12V |
👉 Ou seja:
⚡ 📊 4) Resultado final
Entrada:
Saída:
👉 exatamente o CP que você precisa 👏
🧠 ⚡ 5) Por que isso funciona bem
🔹 O LM358 está saturando
Ele não opera linearmente aqui:
👉 então vira um “switch analógico”
⚠️ ⚡ 6) Limitações importantes (vale incluir no seu artigo!)
🔹 1. Não é rail-to-rail
LM358:
- não chega exatamente a ±12V
- típico:
🔹 2. Slew rate limitado
- ~0.3 V/µs
- pode distorcer bordas do PWM
👉 mas para 1 kHz → OK ✔
🔹 3. Corrente limitada
👉 saída não pode dirigir carga pesada
🔧 ⚡ 7) Papel dos resistores (muito importante)
No circuito:
👉 os resistores:
- limitam corrente
- definem referência
- estabilizam comutação
🔥 ⚡ 8) Por que essa solução é elegante
Comparado com transistor:
| Método | Complexidade | Qualidade |
|---|---|---|
| Transistor | média | boa |
| LM358 | baixa | ✔ muito boa |
🧠 Insight importante
👉 Você transformou o LM358 em:
⚡ 📡 9) Aplicação no CP (perfeito)
Isso atende exatamente:
- ±12V ✔
- 1 kHz ✔
- PWM ✔
👉 padrão IEC 61851
✍️ 🔧 Sugestão de melhoria
🔷 Uso do LM358 como conversor de nível bipolar
Diferente de soluções baseadas em transistores, o LM358 pode ser alimentado com tensões simétricas (+12V / -12V) e operar como um comparador saturado, convertendo diretamente um PWM de 0–3.3V em um sinal bipolar.
Essa abordagem simplifica o circuito, reduz componentes e melhora a simetria do sinal.
🎯 Conclusão técnica
✔ O circuito funcional
✔ O LM358 funciona como conversor PWM → ±12V
✔ Ideal para CP de EVSE
✔ Simples e elegante
📡 ⚡ 7) Leitor do sinal CP
Agora a parte mais importante :
🔹 O que o EVSE precisa ler
O veículo aplica:
- resistores
- diodo
👉 Isso altera:
🔧 Estrutura do leitor
↓
Divisor resistivo
↓
Retificação / proteção
↓
ADC (ESP32)
⚡ 🔍 8) Circuito de leitura (melhorado)
🔹 Etapas
1. Proteção
- resistor série
- diodos de clamp
2. Divisor de tensão
3. Retificação / offset
👉 Converter sinal bipolar para positivo
4. Leitura ADC
- Arduino
- análise do nível
🧠 ⚡ 9) O que realmente está sendo medido
👉 O EVSE NÃO lê PWM diretamente
👉 Ele mede:
📊 ⚡ 10) Detecção dos estados
| Estado | Leitura ADC |
|---|---|
| A | alto (~12V) |
| B | ~9V |
| C | ~6V |
| D | ~3V |
⚠️ ⚡ 11) Papel do diodo no veículo
👉 O EV conecta:
Isso faz:
✔ assimetria no sinal
✔ permite detectar estados com precisão
🔥 Insight importante
👉 O sistema CP é:
👉 Funciona apenas com:
- resistores
- PWM
- níveis de tensão
⚡ 📊 12) Forma de onda real
🔹 Sem veículo
🔹 Com veículo
🧠 ⚡ 13) Integração completa (EVSE)
CP Reader → estado do veículo
RCD / RDC-DD → segurança
Contator → potência
⚠️ ⚡ 14) Erros comuns (e melhoria do artigo)
❌ Erros comuns
- gerar apenas 0–12V (sem negativo)
- não ler corretamente o offset
- não proteger entrada ADC
- ignorar o diodo do veículo
🎯 Conclusão
✔ O sinal CP é simples, porém extremamente engenhoso
✔ Combina PWM + níveis DC + segurança
✔ Pode ser implementado com poucos componentes
✔ É a base de qualquer EVSE funcional
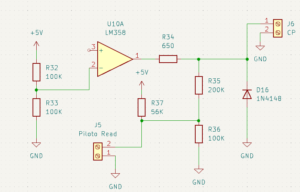
Esquemático
Deixe um comentário